Update vom: 20.07.2020
Newsletter Sonderausgabe zum Halbzeitevent
![[Titelbild: UNICARagil news Sonderausgabe]](/images/news/newsletter-07-2020-hze.jpg)
Die Inhalte dieser Seite finden Sie ebenfalls als Sonderausgabe unseres Newsletters.
Wir freuen uns, Ihnen ensprechende Broschüre zu präsentieren und wünschen Ihnen viel Spaß beim Lesen.
Herzlich willkommen...
... zum digitalen UNICARagil Halbzeitevent. Leider mussten wir unser Event in München absagen. Das hindert uns jedoch nicht daran, Ihnen einen Einblick in das Projekt und die verschiedenen Konzepte zu geben! In den nächsten Wochen werden wir auf dieser Seite genau das vorstellen, das in München zu sehen und hören gewesen wäre.
In unserem ersten Video stellt Prof. Eckstein vor, wie die Idee zu UNICARagil entstand und welche Ansätze hinter der bekannten Projektskizze stehen.
![[Foto: Lutz Eckstein]](/images/personen/eckstein-lutz-200x200.jpg) Prof. Dr. Lutz Eckstein
Prof. Dr. Lutz Eckstein
ika - RWTH Aachen
Gesamtkoordinator
Ohne die Förderung des Bundesministeriums für Bildung und Forschung gäbe es UNICARagil nicht. Thomas Rachel betont die Wichtigkeit der Forschung in seiner Videobotschaft.
![[Foto: Thomas Rachel]](/images/personen/rachel-thomas-200x200.jpg) Parlamentarischer Staatssekretär
Parlamentarischer Staatssekretär
Thomas Rachel
BMBF
Weitere Einblicke
Wer arbeitet in UNICARagil zusammen? Wie spielen verschiedene Architektursichten zusammen? Was erwartet uns noch im Verlauf des digitalen Halbzeitevents?
In diesem Video aus dem Home Office gibt Projektleiter Timo Woopen einen tieferen Einblick in die Arbeit innerhalb von UNICARagil.
![[Foto: Timo Woopen]](/images/personen/woopen-timo-200x200.jpg)
Timo Woopen
ika - RWTH Aachen
Gesamtprojektleiter
Die UNICARagil Use-Cases
Die UNICARagil-Fahrzeuge sind speziell auf ihren jeweiligen Anwendungsfall, auch Use-Case genannt, angepasst. Im Projekt zeigen wir, wie Fahrzeuge für vier verschiedene wichtige Use-Cases aussehen können. Mit unserer modularen Architektur sind aber viele weitere Varianten denkbar!
Projektübergreifende Informationen

Domänen
- Sicherheit
- Mechatronik
- Software
- Automatisiertes Fahren
- Geometrie
![[Foto: Torben Stolte]](/images/personen/stolte-torben-200x200.jpg)
Torben Stolte
TU Braunschweig
Der Domänenkoordinator Torben Stolte zum Thema Sicherheit im Interview.
Sicherheit
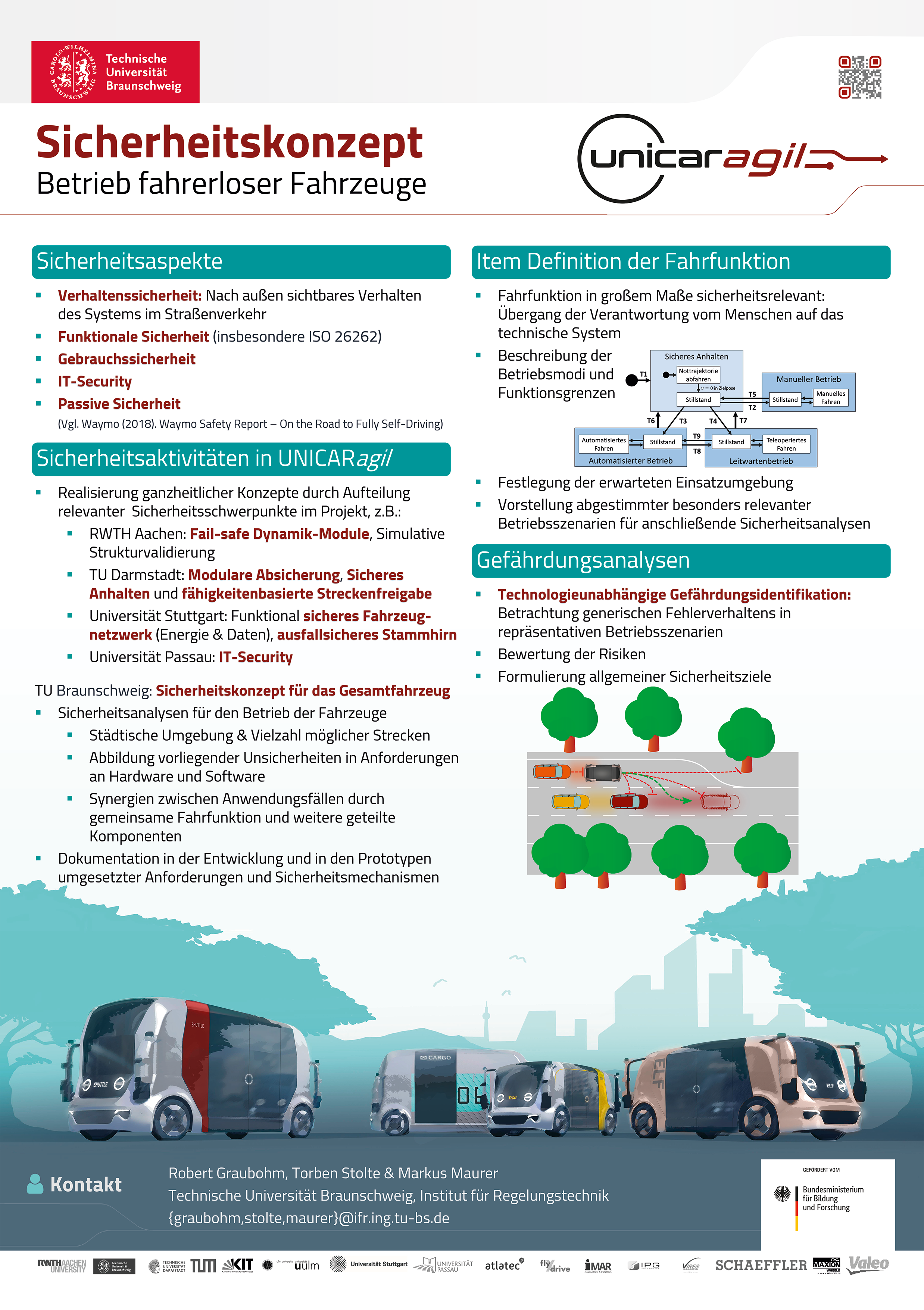
Sicherheitskonzept
Betrieb fahrerloser Fahrzeuge
Sicherheit
Selbstwahrnehmung in der Automatisierung
Was kann die Fahrzeugautomatisierung aktuell leisten?
Sicherheit
Sicheres Anhalten
Sicherheit
Modulare Netzwerkabsicherung
Auflösung von Abhängigkeiten im und über das Netzwerk
Sicherheit
Modulare Absicherung
Sicherheit
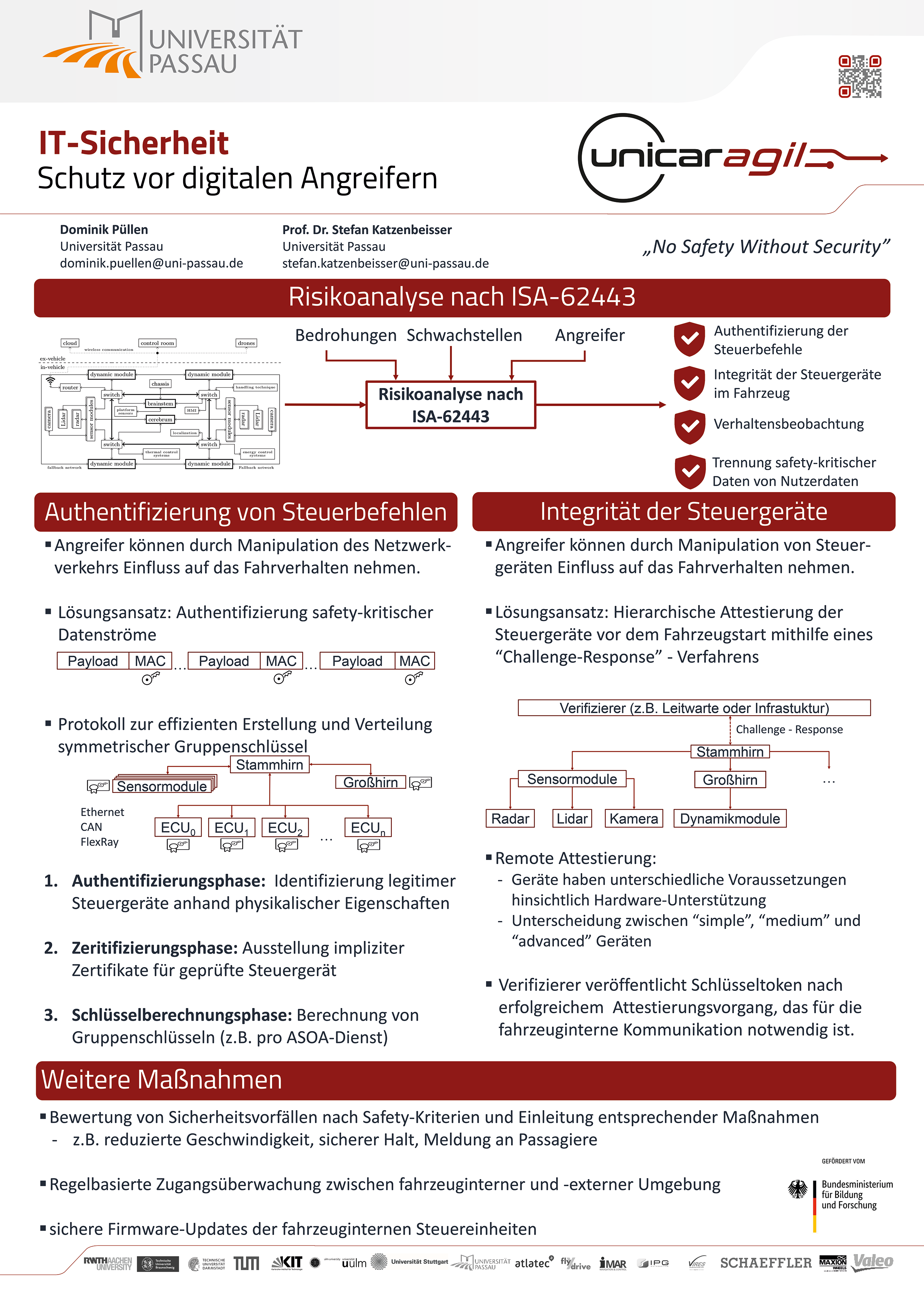
IT Sicherheit
Schutz vor digitalen Angreifern
Sicherheit
Video: Automatisiertes Fahren und Sicherheitsfunktionen
![[Foto: Dr. Dan Keilhoff]](/images/personen/Keilhoff_Dan_200x200.png)
Dr. Dan Keilhoff
Universität Stuttgart
Der Domänenkoordinator Dr. Dan Keilhoff zum Thema mechatronische Architektur im Interview.
Mechatronik
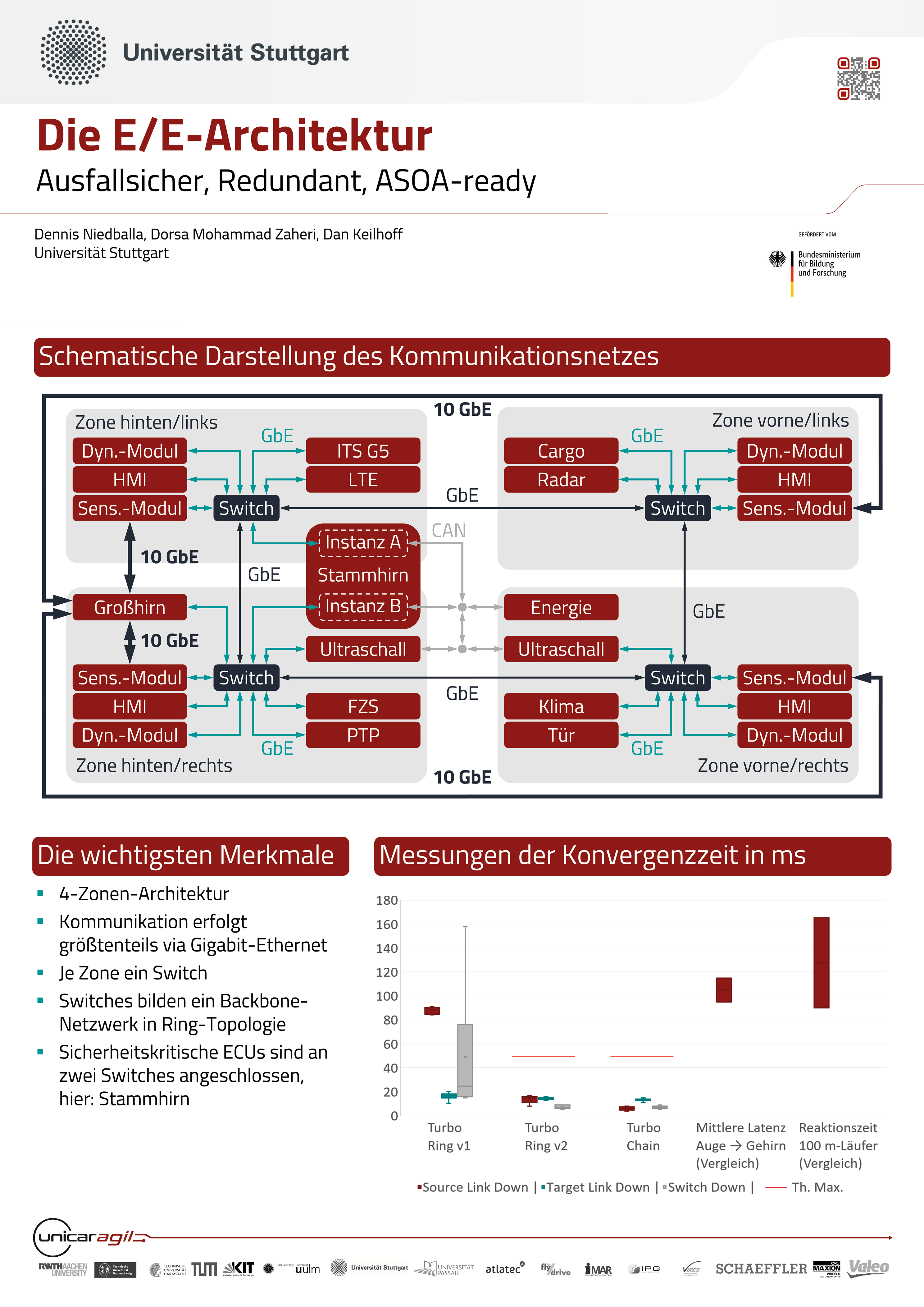
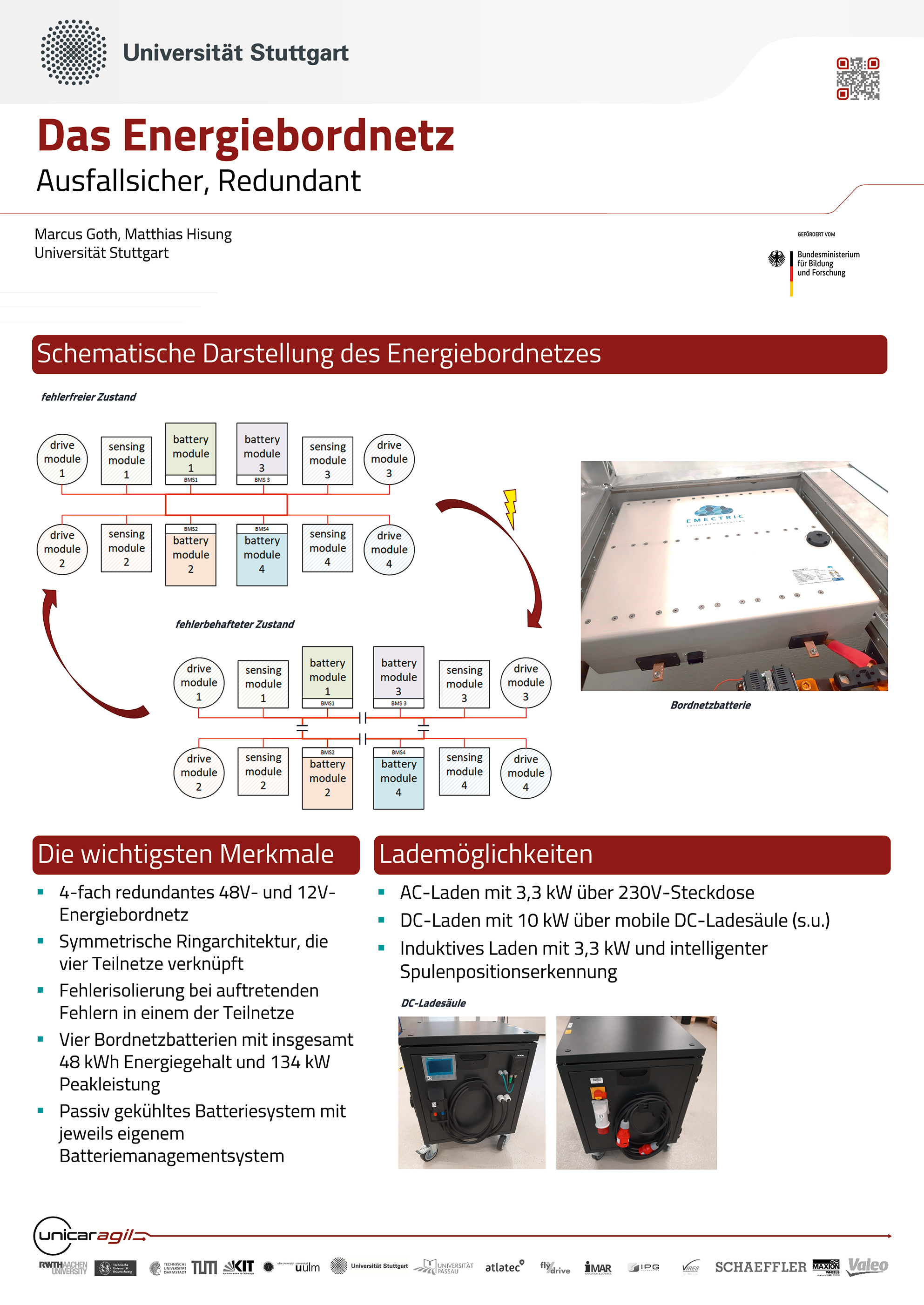
Die E/E-Architektur
Ausfallsicher, Redundant, ASOA-ready

Mechatronik
Das Stammhirn
Fail-Operational, Echtzeitfähig, Leistungsstark
Mechatronik
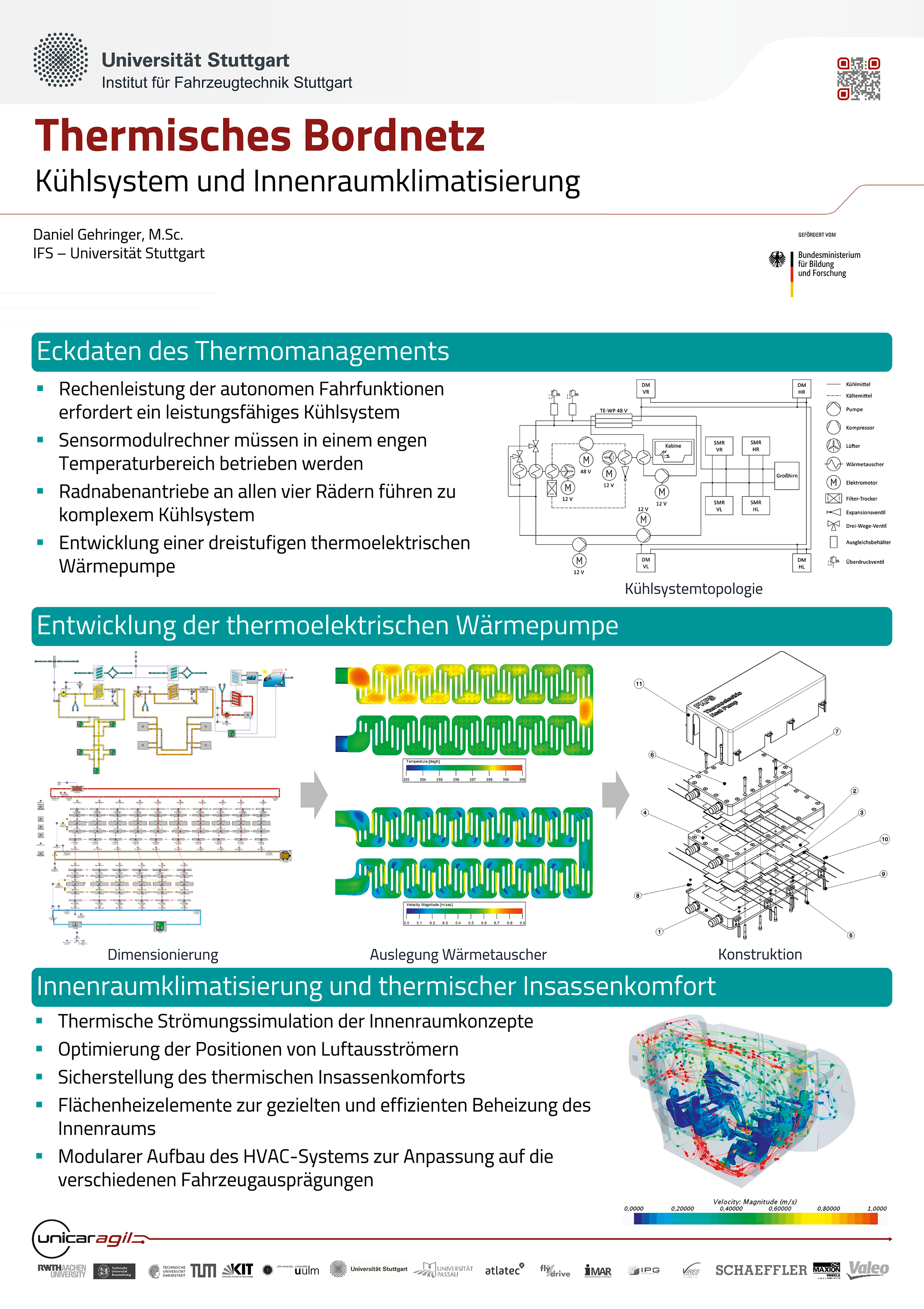
Thermisches Bordnetz
Kühlsystem und Innenraumklimatisierung
![[Foto: Dr. Bassam Alrifaee]](/images/personen/Alrifaee_Bassam_200x200.jpg)
Dr. Bassam Alrifaee
RWTH Aachen- i11
Der Domänenkoordinator Dr. Bassam Alrifaee zum Thema Softwarearchitektur im Interview.
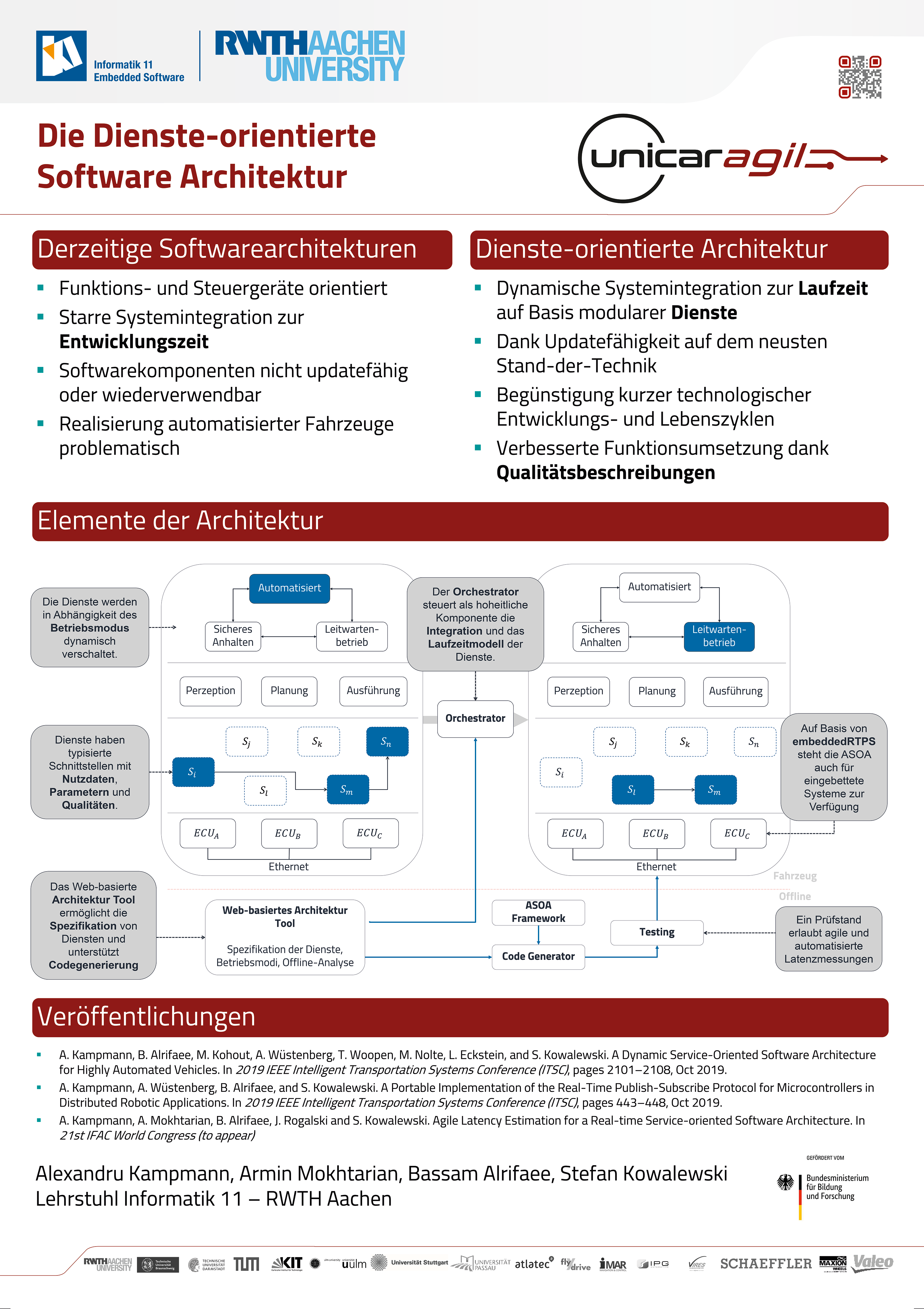
Softwarearchitektur
Die Dienste-orientierte Software Architektur

Softwarearchitektur
Cloud Architektur
![[Foto: Dr. Michael Buchholz]](/images/personen/buchholz-michael-200x200.jpg)
Dr. Michael Buchholz
Universität Ulm
Der Domänenkoordinator Dr. Michael Buchholz zum Thema Automatisiertes Fahren im Interview.
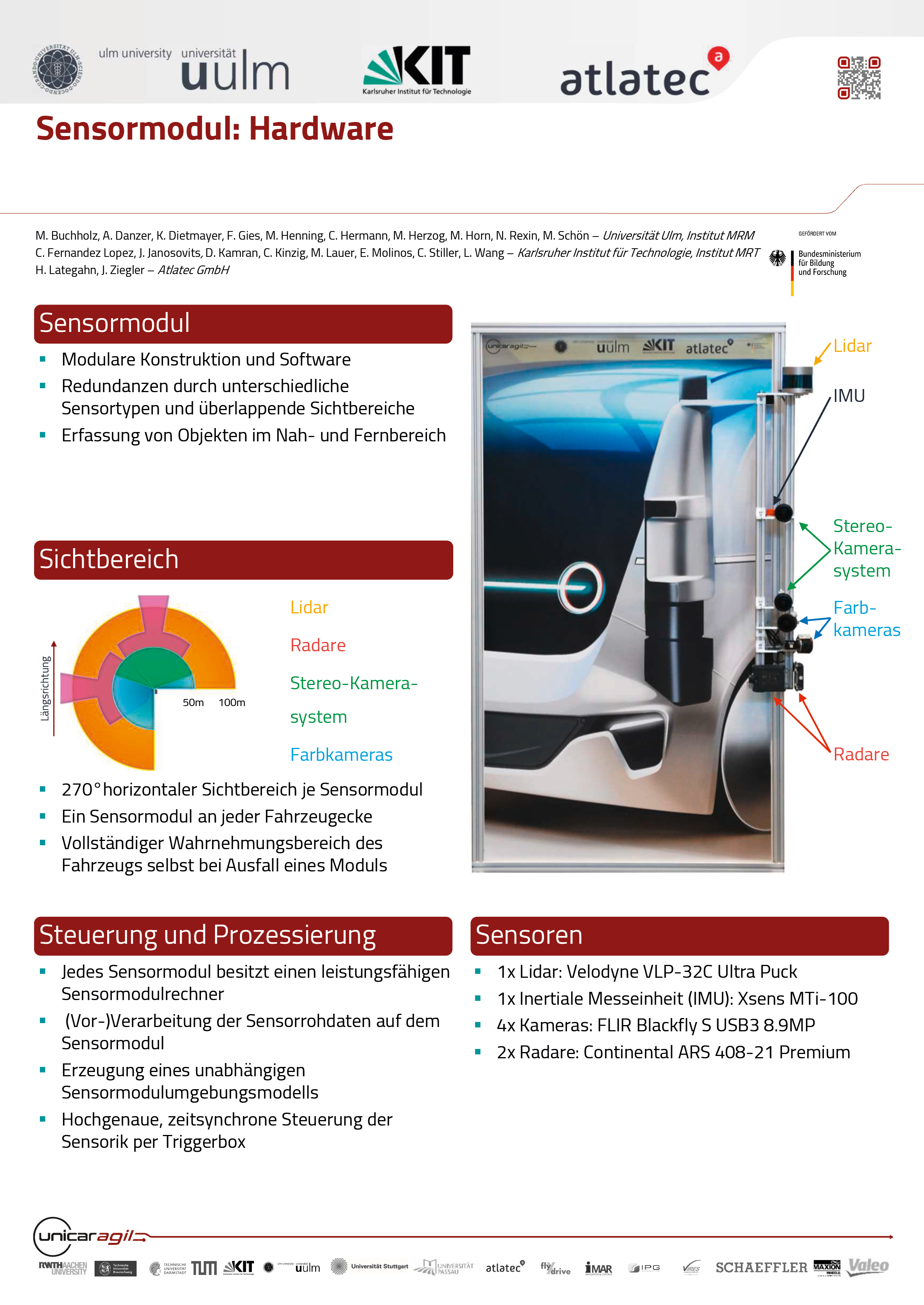
Automatisiertes Fahren
Sensormodul: Hardware
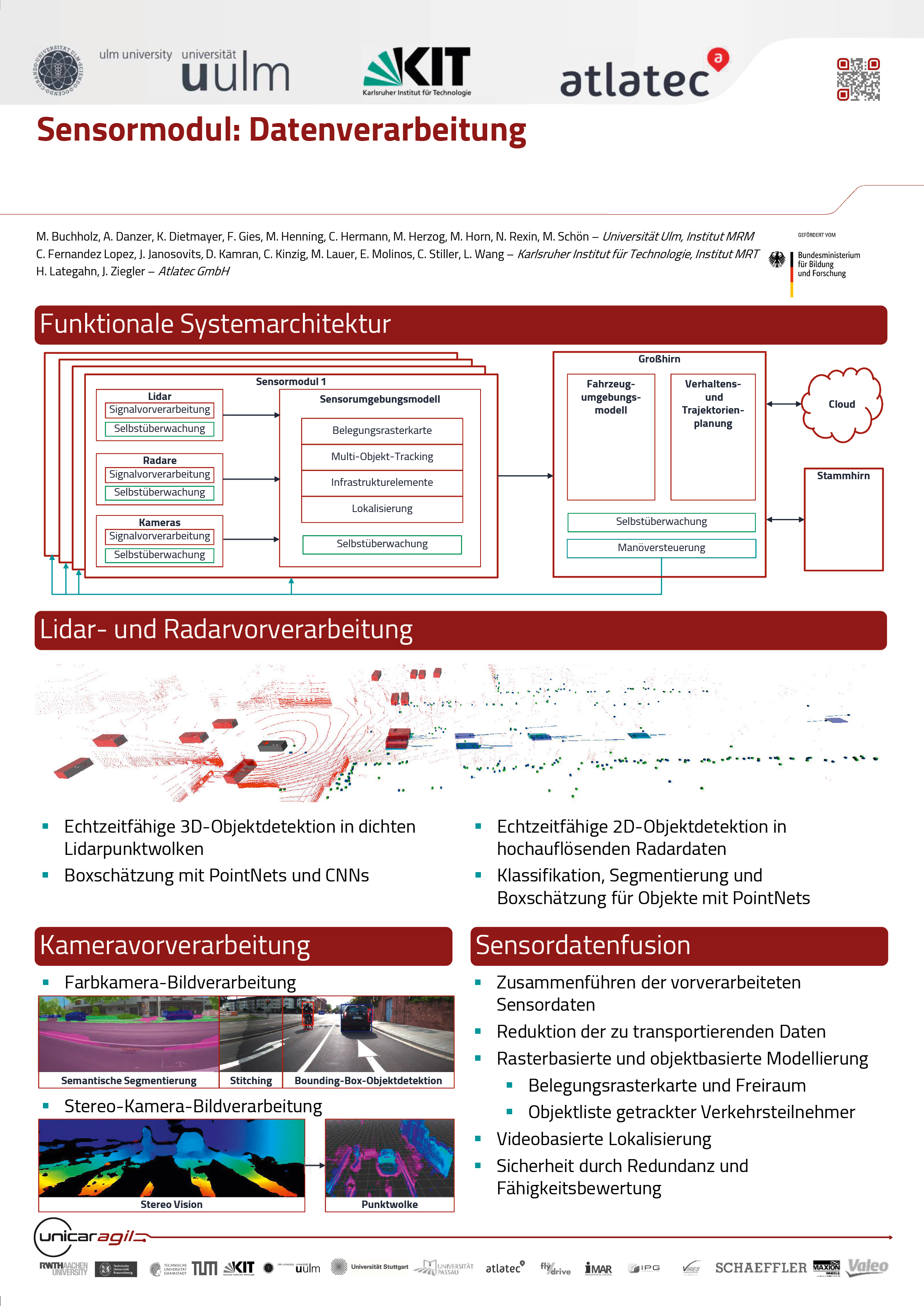
Automatisiertes Fahren
Sensormodul: Datenverarbeitung
Automatisiertes Fahren
Video: Sensormodule
Automatisiertes Fahren
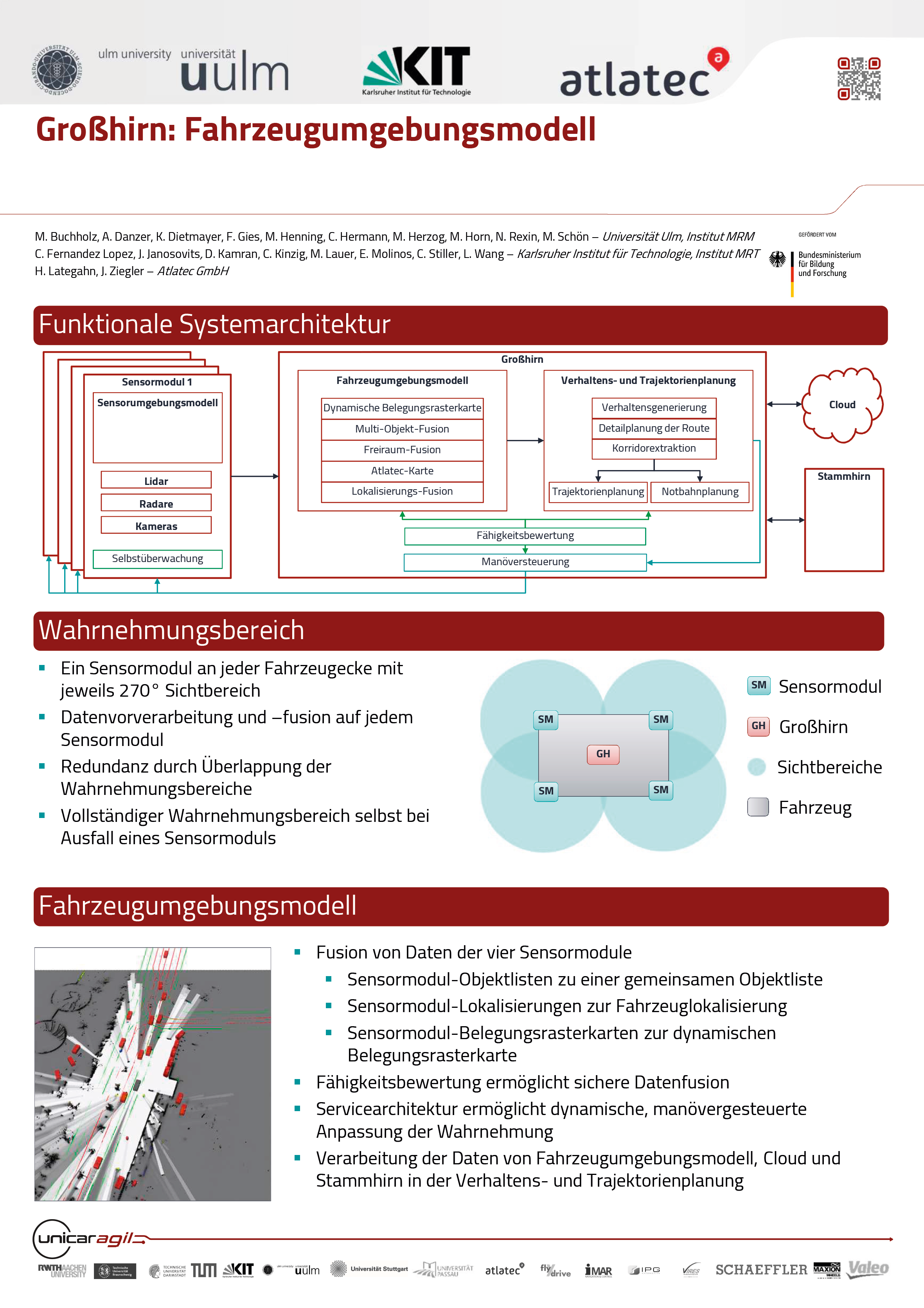
Großhirn: Fahrzeugumgebungsmodell

Automatisiertes Fahren
Verhaltens- und Trajektorienplanung
Automatisiertes Fahren
Video: Verhaltens- und Trajektorienplanung

Automatisiertes Fahren
Lokalisierung und Bewegungsregelung
Automatisiertes Fahren
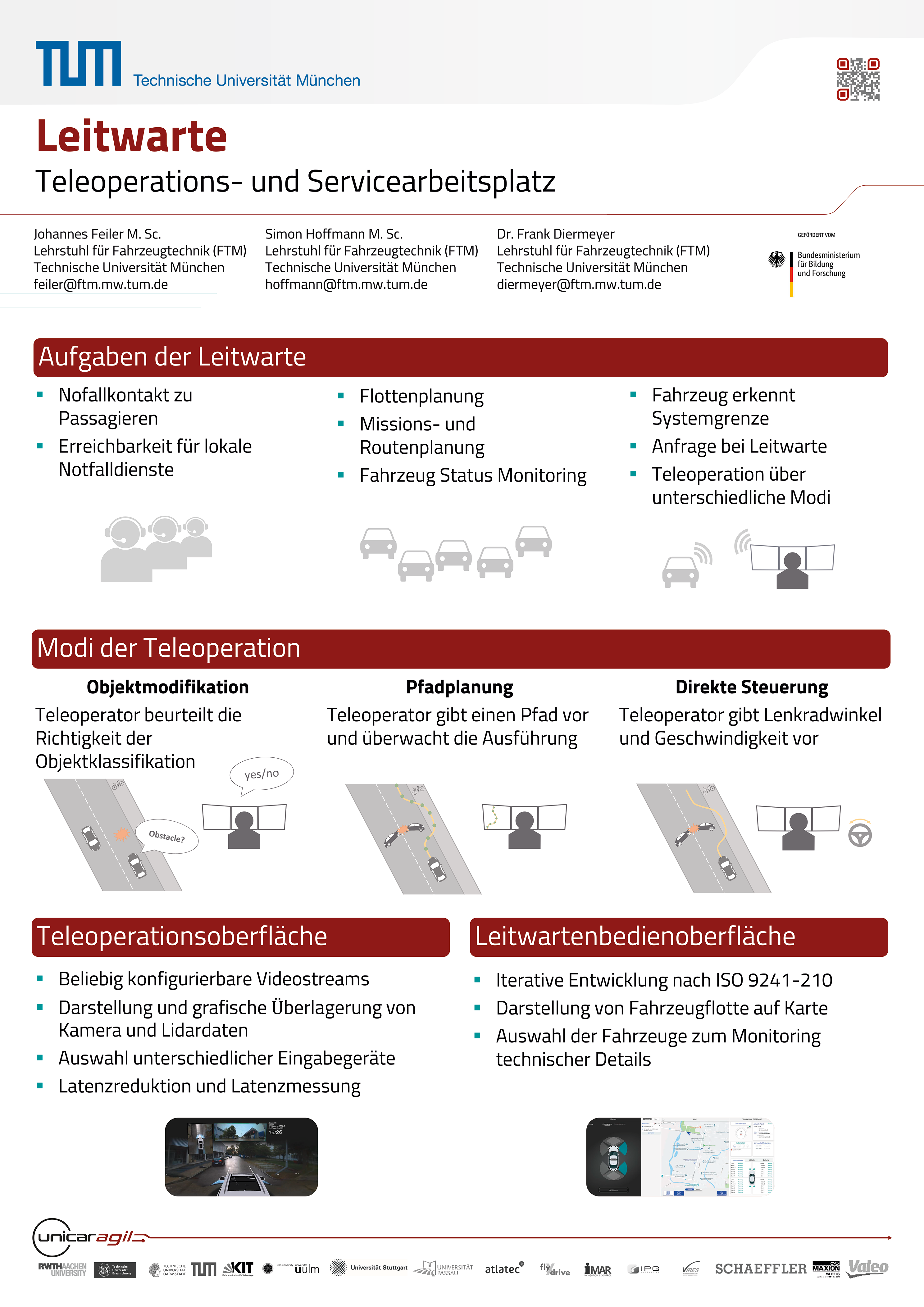
Leitwarte
Teleoperations- und Servicearbeitsplatz

Automatisiertes Fahren
Cloud-Dienste
Kollektives Umfeldmodell und Kollektives Gedächtnis
Automatisiertes Fahren
Video: Automatisiertes Fahren und Sicherheitsfunktionen
![[Foto: Torben Böddeker]](/images/personen/boeddeker-torben-200x200.jpg)
Torben Böddeker
RWTH Aachen - ika
Der Domänenkoordinator Torben Böddeker zum Thema Geometrische Gestaltung und Mensch-Maschine-Interaktion im Interview.

Geometrie
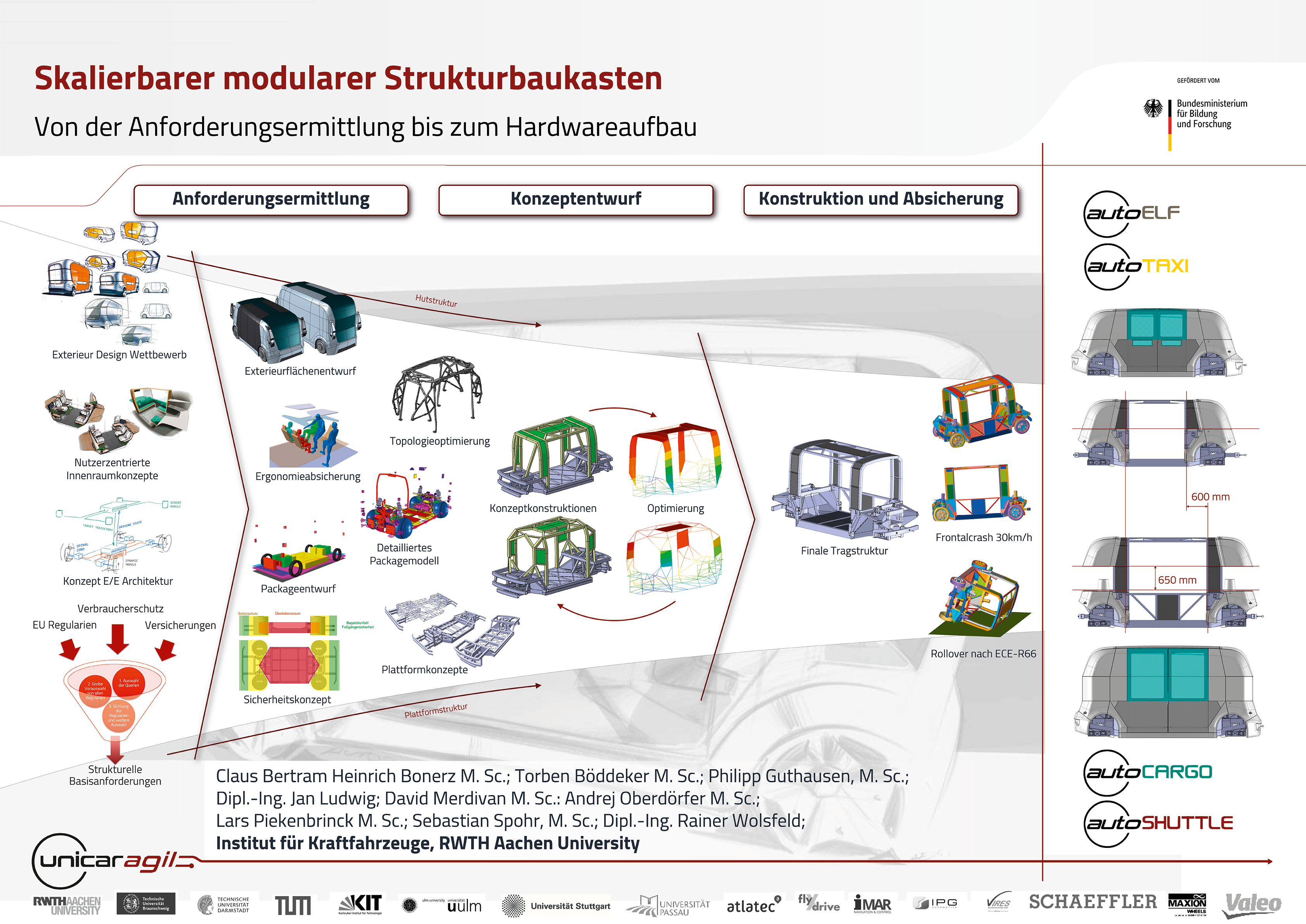
Skalierbarer modularer Strukturbaukasten
Von der Anforderungsermittlung bis zum Hardwareaufbau

Geometrie
autoSHUTTLE: Vision und Interieur
Automatisierter öffentlicher Personennahverkehr
Geometrie
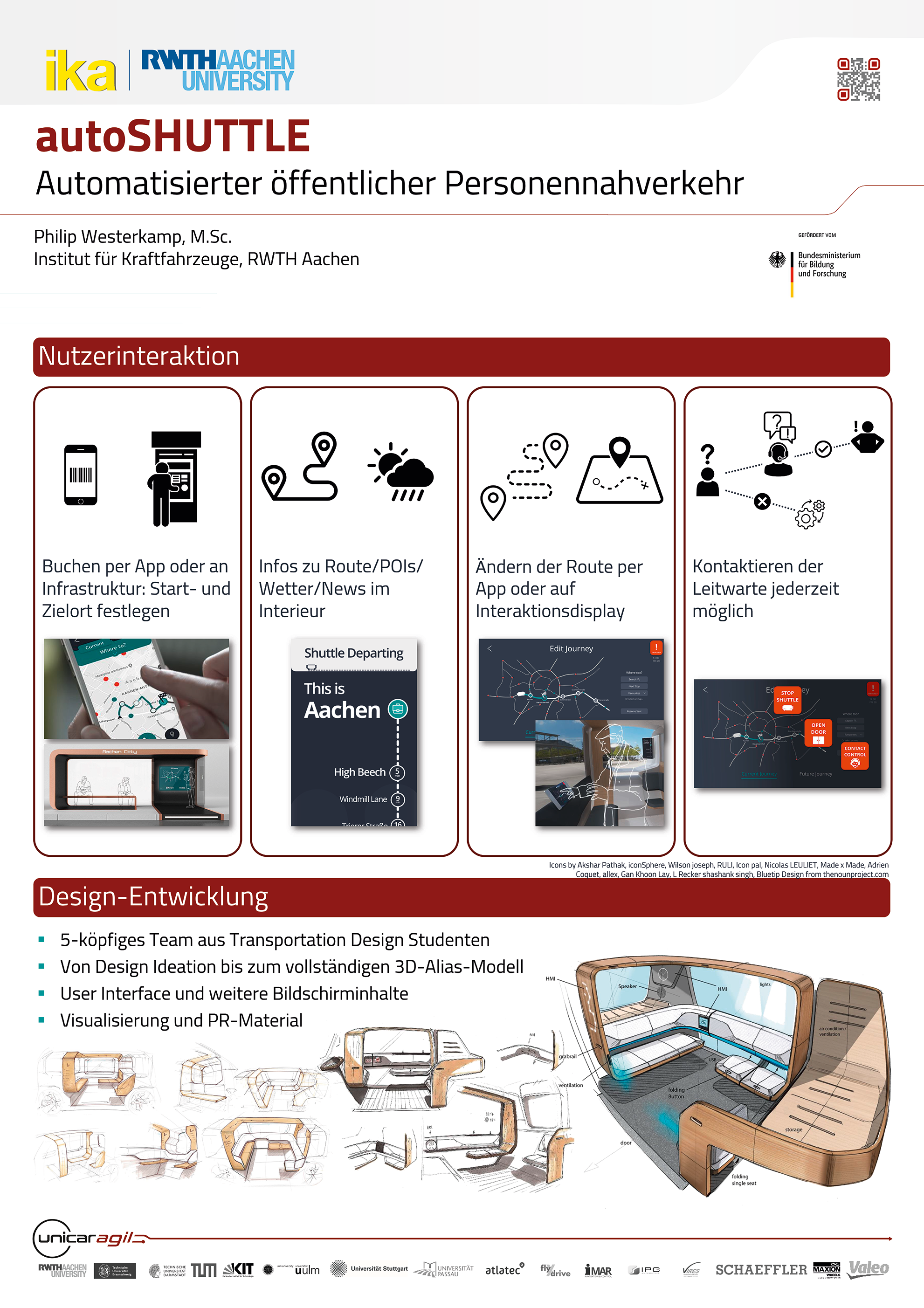
autoSHUTTLE: Nutzerinteraktion und Design
Automatisierter öffentlicher Personennahverkehr
Geometrie
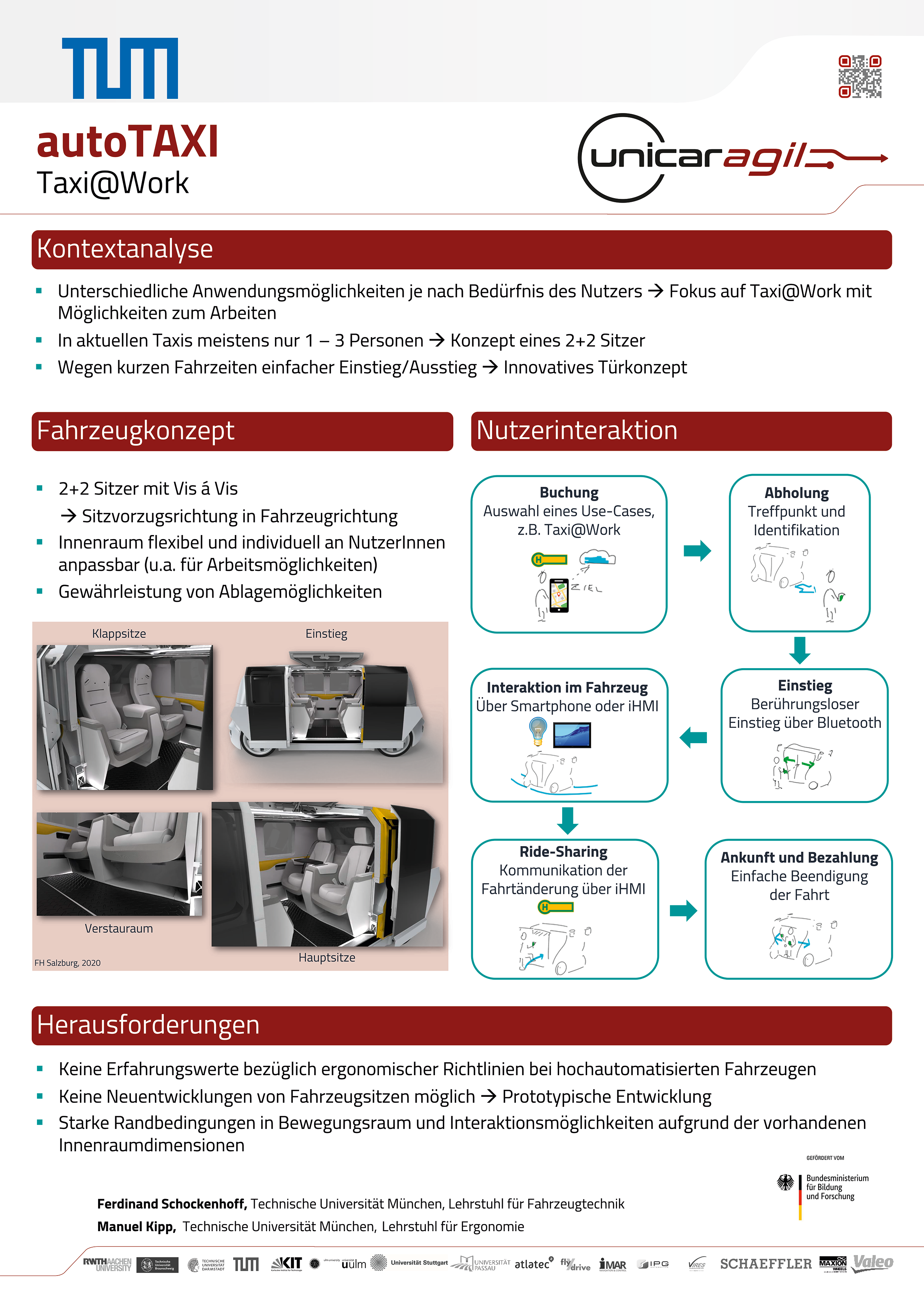
autoTAXI
Taxi@Work

Geometrie
autoCARGO
Geometrie
Video: Auslieferung autoCARGO
Geometrie
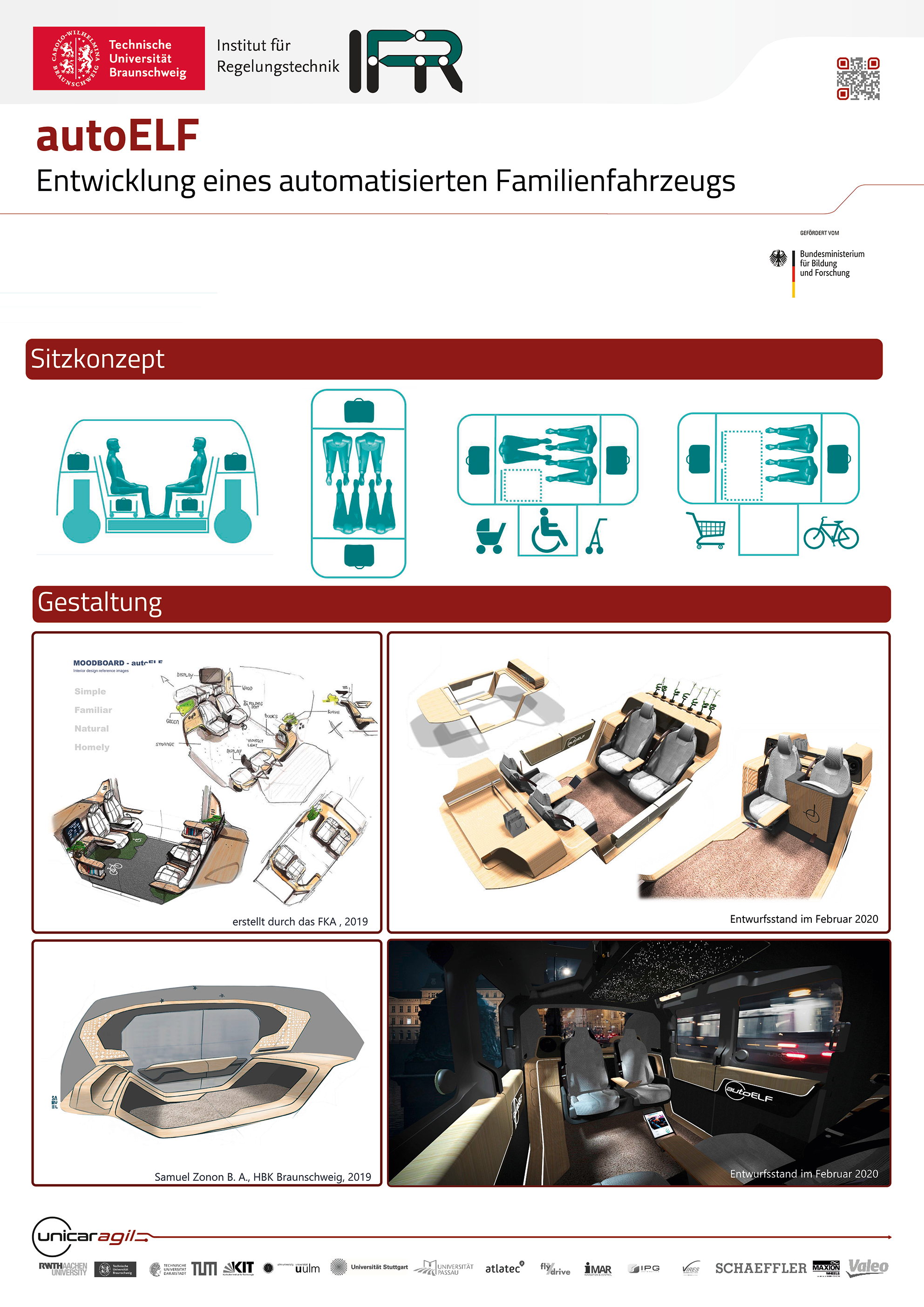
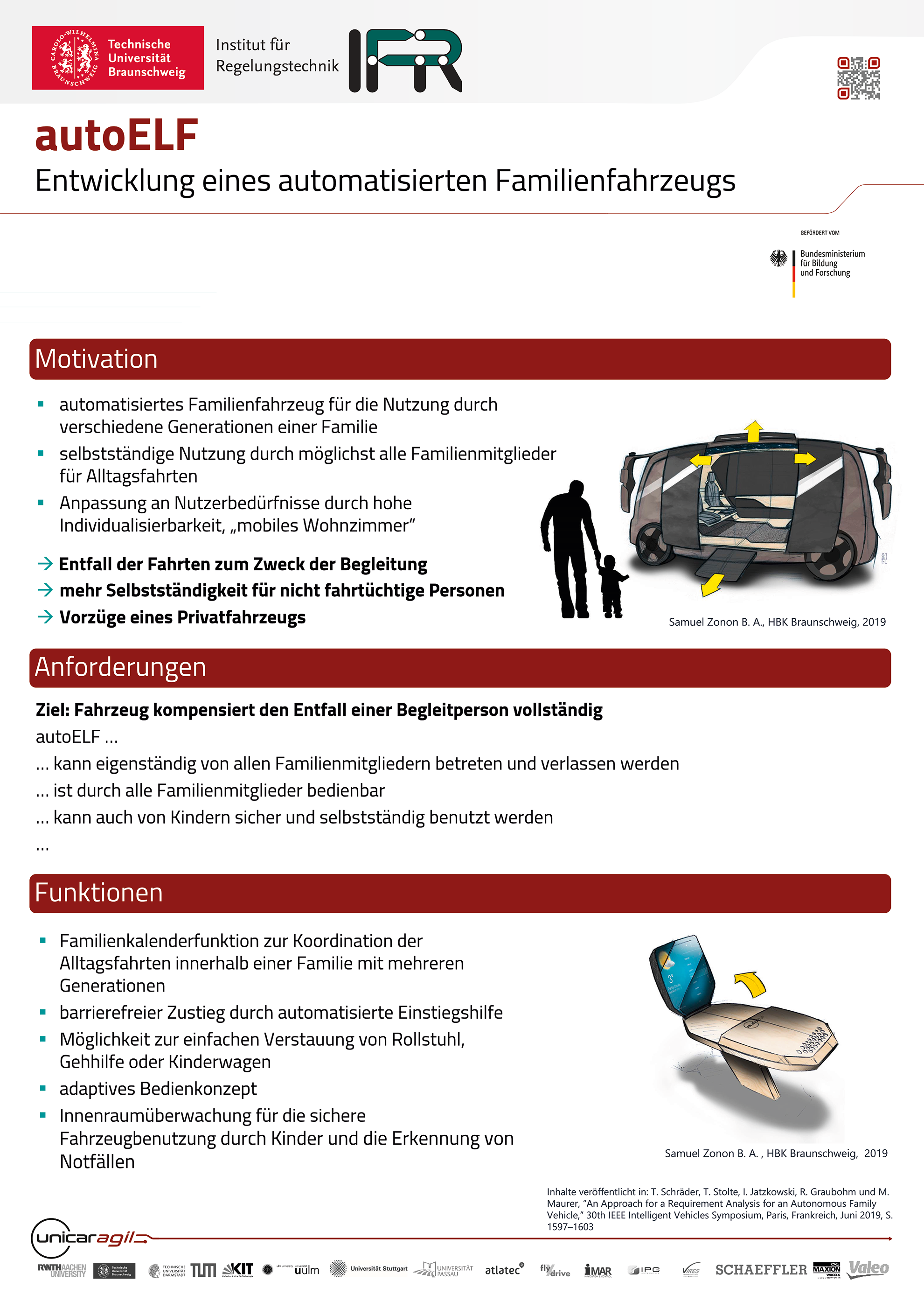
autoELF: Vision
Entwicklung eines autonomen Familienfahrzeugs

Geometrie
autoELF: Innenraumkonzept
Entwicklung eines autonomen Familienfahrzeugs

Geometrie
Externe Kommunikation autonomer Fahrzeuge
Geometrie
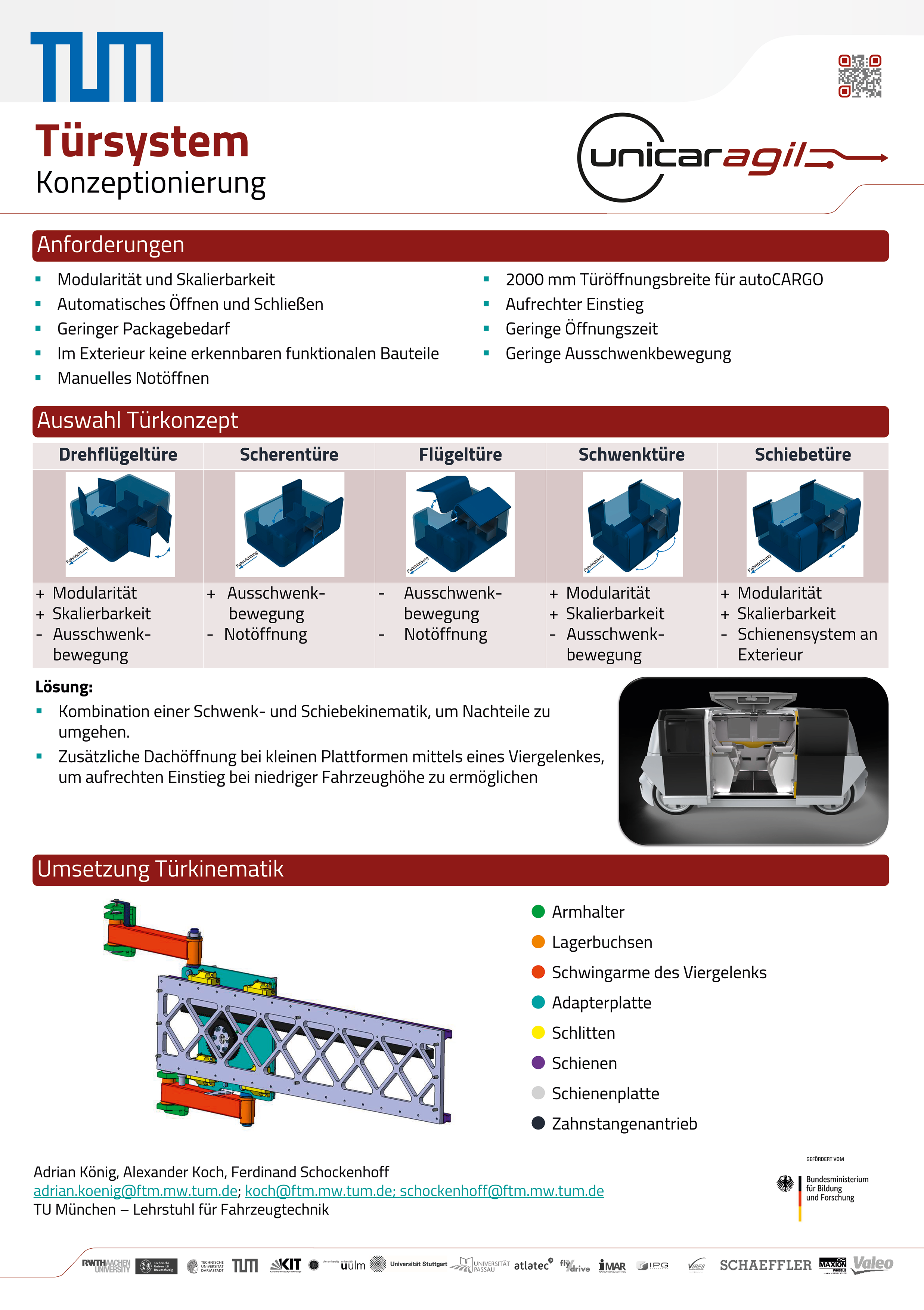
Türsystem
Konzeptionierung
Geometrie
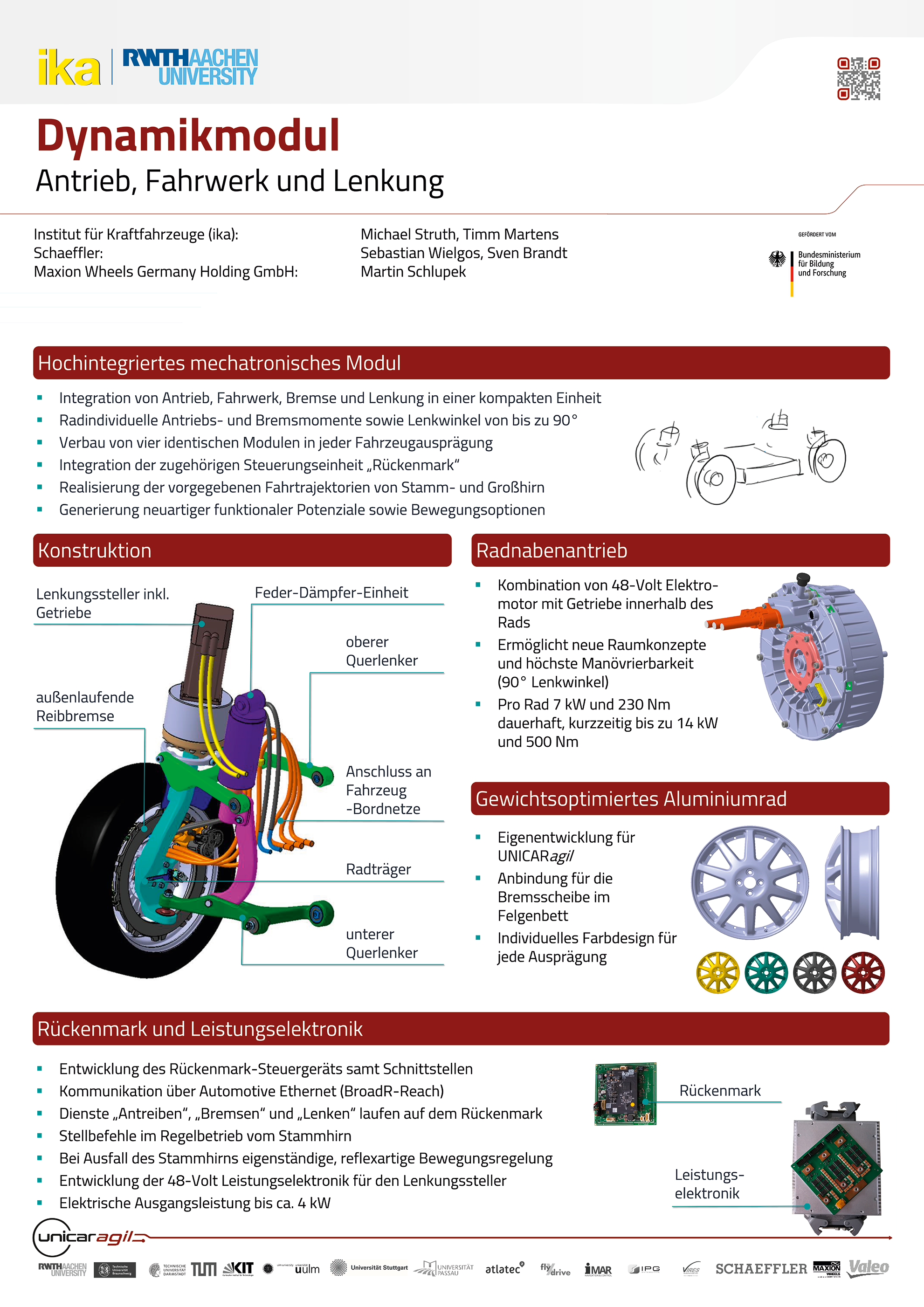
Dynamikmodul
Antrieb, Fahrwerk und Lenkung
Fragen oder Feedback